


- 当叙事退潮:SpaceX世纪IPO破发,给特斯拉与智能汽车产业上了一课
- 美交管局驳回特斯拉车门缺陷调查申请,同步启动全国车门安全新规立法;电动化布局拉开
- 保时捷多重压力下拟追加5000人裁员; 特斯拉ADAS月度事故达207起创纪录引
- 特斯拉Robotaxi增长陷入停滞;小鹏释放赴美建设工厂意向;大众深化与地平线合
- FSD低能见度调查进入攻坚阶段; 理想汽车拟分拆半导体业务;特斯拉发生远程操作事
- 特斯拉FSD用户吃超速罚单凸显预设模式缺陷;沈阳亚迪唐EV低速拖行后驱电机;本田
- 全球轻型车产量预测下调3.1%;本田停产美国市场唯一纯电车型全面转向混动战略;道
- 特斯拉二季度业绩多项核心业务目标持续跳票遭股东质问;吉利发布16合1高度集成电驱

-

西门子Polarion ALM机器人研发解决方案
价格¥250000-800000
-

四足仿生机器人
价格¥30000~300000
-

具身智能全栈式智能化解决方案
价格¥30000~800000
-

智能代步机器人
价格¥30000~300000
-

MOUENEWT 全域感知移动智能体
价格¥30000~300000
-

火狗四足机器人
价格¥30000~300000

成像与计算深度融合,飞凌微推出新一代车载视觉处理SoC M2
技术先进的智能视觉处理芯片厂商飞凌微电子(Flyingchip®,思特威子公司,以下简称“飞凌微”)近日宣布,正式推出新一代高性能车载视觉处理SoC——M2。该

华为”收割”汽车行业:一个月内三款新车密集上市,传统Tier 1还有活路吗?
导语2026年7月的第三周,值得在中国汽车工业史上留一行。7月16日,华为乾崑在深圳办了一场媒体日,公布了ADS 5的OTA商用计划;7月20日,东风与华为乾崑

Vishay推出车规级光电晶体管光耦合器,提高800 V 电动汽车电池隔离电压额定值
器件采用4引脚LSOP薄型封装,隔离电压5000 VRMS,绝缘重复峰值电压VIORM 1414 Vpeak,绝缘瞬态峰值电压VIOTM 8000 Vpeak日

Vishay 扩充 ILHB 系列车规级铁氧体磁珠,支持更广泛的 EMC 降噪应用
器件现已推出 0402、0603、0805、1008、1206 多款小型封装,额定电流高达 6A,阻抗范围10Ω~2700Ω日前,威世科技Vishay Inte

Vishay新款IHXL系列电感器提供高达209 A的额定电流,磁芯损耗降低20 %
新款汽车级和商用器件的成本低于现有解决方案,不仅具备更强的电磁兼容性,还可提供高达10 µH的电感值日前,威世科技Vishay Intertechnology宣

加拿大Mirsee发布MH3轮式人形机器人,锚定高危工业场景2027年启动规模化量产
加拿大初创企业MirseeRobotics推出第三代人形机器人MH3,采用轮式移动平台+人形上肢的融合形态,锚定制造业高危、高强度作业场景。产品单臂负载可达30公斤,整机31自由度,单次充电续航10小时,支持1500公里超远距离VR遥操作,配套自研立体视觉系统、全向移动平台、高精度执行器等全栈技术。目前8台原型机正处于...

KAIST推出DiSPo机器人学习技术,扩散模型融合SSM实现粗糙演示精准复刻
韩国科学技术院(KAIST)计算机学院朴大铉团队发布全新机器人学习模型DiSPo,首创「扩散模型+状态空间模型」双架构融合方案,可直接从低频粗糙的人类演示数据中学习,自主生成高精度精细动作,破解了精密操作任务高度依赖高频采样数据、采集成本高昂的行业痛点。模型引入步长缩放因子支持任务级精度调节,仿真测试中任务成功率较当前...

FAU研发个性化自学习假肢控制系统,定制传感+专属AI模型破解上肢假肢通用适配痛点
佛罗里达大西洋大学(FAU)团队发布新型智能假肢手控制方案,依托3D打印定制穿戴袖套、柔性磁传感器阵列与个体专属AI模型,可自主学习每位用户的独特肌肉运动模式,实现设备主动适配用户而非用户迁就设备。经10名受试者(含3名上肢截肢者)测试,系统可实时识别19种手部与腕部手势,针对残肢肌肉定制传感器布局后,多手势控制准确率...

马斯克辟谣Optimus“四维象棋”叙事,万级零件全新产线初期量产爬坡将极度缓慢
针对特斯拉粉丝群体中流传的「Optimus隐瞒真实进度、V3发布将批量亮相」的“4D象棋”阴谋论,马斯克公开直接予以否认,明确表示人形机器人初期量产速度将极度缓慢,核心原因在于产品包含近万个独特零部件、配套全新产线,量产逻辑与汽车完全不同。回顾项目历程,Optimus的量产与落地目标已多次延期,2025年万台量产、千台...

北卡州立联合莱斯大学研发水分驱动柔性电池,仿生结构+内置自毁开关赋能绿色IoT与特种场景
美国北卡罗来纳州立大学与莱斯大学联合团队发表于《科学进展》的研究推出全新水分激活电池(MAB),采用镁阳极、银/氯化银阴极搭配载盐纤维素隔膜,可从空气甚至沙漠环境中汲取水分自发形成电解液,全程无毒无易燃组分。团队借鉴穿山甲鳞片结构实现高倍率拉伸下能量密度无显著衰减,实测可驱动蓝牙血氧仪连续运行30小时,性能对标同规格传...

OpenAI启动PatchthePlanet开源安全计划:AI+人工双审模式系统性加固全球数字底座安全
OpenAI推出「PatchthePlanet」开源安全专项,隶属于Daybreak项目体系,联合顶尖安全厂商TrailofBits及社区生态伙伴,打造「AI漏洞挖掘+安全专家人工审核+补丁开发落地」的全链路安全服务。方案区别于传统自动化扫描的海量误报模式,所有发现均经安全工程师去重、定级、验证后,附带完整补丁与测试用...

KELA发布2026年中AI威胁全景报告:AI同时成为攻击武器与核心攻击目标
网络安全厂商KELA发布《2026年中AI威胁全景报告》,指出全球网络安全已进入智能体攻防新阶段:AI已从攻击辅助工具升级为自主执行层,可独立完成漏洞发现、利用、提权、横向移动的全链路多步攻击,将漏洞补丁响应窗口从数月压缩至数小时;同时AI自身催生全新攻击面,企业提示词库、AI记忆文件、认证会话Cookie成为高价值窃...

Verkada获英伟达战略投资升级物理AI安防平台,世界模型加持时空语义检索精度提升68%
云原生物理安防厂商Verkada宣布获得英伟达战略投资,双方将基于英伟达Cosmos世界基础模型与物理AI数据工厂,联合升级Verkada全栈安防运营平台的视频分析与语义检索能力。合作落地后,平台时空理解类AI搜索的平均精度提升68%,可实现按语义、行为、场景的自然语言检索,替代传统按时间、点位的低效排查模式。目前Ve...

企业AI进入规模化落地深水区,组织适配能力取代模型性能成为核心竞争壁垒
AWS宣布投入10亿美元组建前置工程团队,将数千名AI工程师深度嵌入客户业务侧,全流程辅助企业搭建生产级AI系统;微软同步推出FrontierCompany企业AI部署服务,行业共识逐步形成:企业AI的核心矛盾已从“选最好的模型”转向“让技术融入业务”。福特产线AI质量检测落地遇阻后回聘350名资深员工的案例印证,AI...

英伟达发布Halos机器人全栈安全系统,构建物理AI端到端标准化安全底座
英伟达正式面向机器人领域推出Halos全栈安全系统,打通算力硬件、传感互联、安全操作系统、AI防护算法、合规认证全链路,打破传统机器人安全仅依赖本机传感器的局限,配套Outside-In全域感知安全蓝图,覆盖人形机器人、协作机械臂、AMR集群全品类,提供从仿真验证到真机量产一体化安全解决方案,大幅降低人机混产场景安全落...

两年3万+缺口!汽车功能安全工程师究竟长什么样?
功能安全工程师的工作内容有哪些专业比较匹配该岗位功能安全工程师岗位如何快速入门功能安全工程师的日常工作协作关系功能安全工程师的发展前景功能安全工程师的上升通道功能安全工程师需要掌握的技能以及工作难点1功能安全工程师的工作内容功能安全工程师主要实在功能安全经理和项目经理的管理和指导下,完成产品功能安全设计、开发和验证。
成像与计算深度融合,飞凌微推出新一代车载视觉处理SoC M2
技术先进的智能视觉处理芯片厂商飞凌微电子(Flyingchip®,思特威子公司,以下简称“飞凌微”)近日宣布,正式推出新一代高性能车载视觉处理SoC——M2。该
华为”收割”汽车行业:一个月内三款新车密集上市,传统Tier 1还有活路吗?
导语2026年7月的第三周,值得在中国汽车工业史上留一行。7月16日,华为乾崑在深圳办了一场媒体日,公布了ADS 5的OTA商用计划;7月20日,东风与华为乾崑
Vishay推出车规级光电晶体管光耦合器,提高800 V 电动汽车电池隔离电压额定值
器件采用4引脚LSOP薄型封装,隔离电压5000 VRMS,绝缘重复峰值电压VIORM 1414 Vpeak,绝缘瞬态峰值电压VIOTM 8000 Vpeak日
Vishay 扩充 ILHB 系列车规级铁氧体磁珠,支持更广泛的 EMC 降噪应用
器件现已推出 0402、0603、0805、1008、1206 多款小型封装,额定电流高达 6A,阻抗范围10Ω~2700Ω日前,威世科技Vishay Inte

大联大世平北京车展首秀,携手安森美(onsemi)等伙伴展现车载电子系统整合实力
大联大控股旗下世平集团宣布,首次亮相2026北京国际汽车展览即获得市场高度关注,显著提升产业可见度。此次世平展位整合多家国际半导体与车用技术伙伴资源,通过实车展

“舱驾一体”渐行渐近,“好用”的车载AI芯片该如何设计与定义?
“舱驾一体”渐行渐近,“好用”的车载AI芯片该如何设计与定义?
智能网联汽车多域电子电气架构会如何发展?
本文总体车载软件架构设计、硬件系统、通信系统和软件系统四个角度对ICV多域E/E架构研究的关键技术进行了深入分析,并展望了未来的发展趋势。

详解智能座舱通信技术
本文主要介绍了智能座舱通信技术相关内容。

汽车网络安全及相关标准 | 你的智能座驾有多脆弱?
基于简单的案例分析和标准介绍,得出除了车厂必须保证所设计的车辆系统的安全性,还有其他能减少“表面攻击”的工作要做。智能汽车的出现为技术和创新的无限可能性打开了大门,但也为汽车本身以外的威胁打开了大门。

符合AUTOSAR标准的汽车SoC软件架构及其漏洞
漏洞被映射到一个具有代表性的 SoC 软件架构模型,该模型遵循 AUTOSAR 的分层抽象和面向服务原则。

深度强化学习驱动的自动驾驶运动规划:建模方法与场景化应用
本文深入探讨了分层运动规划问题,阐述了深度强化学习的基础。

基于AUTOSAR系统的快速原型开发
本文提出了一种将非 AUTOSAR 兼容的原型代码自动集成到 AUTOSAR 系统中的概念

软硬件解耦驱动下的SDV变革:技术栈升级与安全验证
本文重点指出了当前存在的关键障碍,包括分散的认证框架、标准化工具链的缺失、持续验证支持不足以及软件维护与维修复杂度的不断上升
动态链接驱动的模块化电动车E/E架构云重构方案
本文提出一种混合软件架构,将面向信号的架构(如 CAN 总线)与面向服务的架构相融合

英特尔披露先进制程完整路线:18A-P进入风险试产,三大底层技术锁定下一代芯片赛道
2026年VLSI国际集成电路研讨会上英特尔代工完整披露先进制程迭代方案,性能增强版Intel18A工艺18A-P正式进入风险试产,依托RibbonFETGAA晶体管、PowerVia背面供电实现PPA全面升级;同时亮出CFET垂直晶体管、硅基氮化镓单片集成、减成法钌互连三大远期核心技术,打通近、中、长期芯片微缩路径,...

算苗3DTokenPUA4E正式流片:国产3D堆叠推理芯片开辟全新算力赛道
国内算力芯片企业算(SUNMMIO)宣布首款3DTokenPU推理芯片A4E完成流片,依托全国产供应链与独创3D混合堆叠架构,直击大模型推理“内存、算力、通信”三大行业壁垒。芯片采用8层存储垂直堆叠设计,实现16TB/s超高访存带宽,搭配Tile-Native软硬件协同体系,专为TransformerToken处理优化...

微波赋能锂电正极升级再造,废旧电池实现高效增值循环
摘要:美国桑迪亚国家实验室研发出全新微波基锂电正极升级再造工艺,依托微波反应与离子交换技术,可快速将废旧锂离子电池正极材料拆解为纳米片结构,不仅大幅缩短处理时长

范德华晶体仿生技术问世,重塑新一代半导体材料体系
摘要:韩国成均馆大学科研团队成功实现范德华晶体仿生制备,模拟天然晶体的分子堆叠与结合方式,打造出性能优异的新型二维范德华半导体材料。该材料依托范德华力实现层间结

简易涂层工艺革新晶体管制造,赋能新一代芯片量产
摘要:科研团队推出全新简易涂层制备技术,大幅简化半导体晶体管薄膜沉积流程,在保障薄膜均匀度、绝缘性与附着强度的同时,降低芯片制造成本、提升晶圆良率。该工艺适配2

车载安全(五):车载安全系统的开发过程和安全评估方法
摘要:为了解决车载安全问题,必须改变车载系统的开发流程,并且必须建立评估这些系统安全级别的系统。汽车安全技术的开发流程是怎样的?美国汽车工程师协会 (SAE)
车载安全(三):OTA车载软件更新和远程诊断
随着车载软件规模和复杂性的不断增长,对无线空中下载 (OTA) 更新的需求日益增加。同时,利用无线网络进行远程诊断的需求也在不断增长。运行这些 OTA 更新和远

ISO 26262实际应用(三):流程实施
本期,我们想解释一下功能安全流程的实施(构建),它也是准备工作的一部分,但却是实施过程中的第一个难关,也是最关键的部分。

ISO 26262实际应用(二):确定功能安全人员后应做的“准备工作”
我们解释了在开始开展符合 ISO 26262(汽车功能安全标准)的活动之前应该了解的“风险”,以及该标准的范围以及如何确定发起人。

浙大研发机载感知运动控制策略,无人机实现窄缝自主高速穿越
摘要:浙江大学科研团队发布基于强化学习的无人机感知运动(Sensorimotor)控制策略,整套算法仅依托机载相机与内置惯性传感,无需提前获知缝隙位置、角度,即

流线型机翼技术取得突破,大幅提升无人机飞行稳定性与能效
摘要:全新流线型平滑机翼技术正式亮相,该方案优化机翼表面气动形态与整体结构,有效抑制气流紊流、降低飞行风阻,解决小型无人机在乱流、阵风环境下飞行颠簸、续航偏短等

低空物流如何重塑城市配送?闪送×杭州商业试点落地,四大核心模块拆解 “空中物流” 架构
闪送(BingEx,纳斯达克:FLX)联合杭州市及本地企业启动城市级低空物流网络商业试点,依托 11 年运营经验、覆盖 297 城的全国网络及数亿用户数据,以 “基础设施 + 需求整合 + 运力供给 + 运营管理” 四大核心模块,构建高效安全的智能无人机配送体系,首批航线保持零事故记录。项目目标 2025 年建成杭州全...
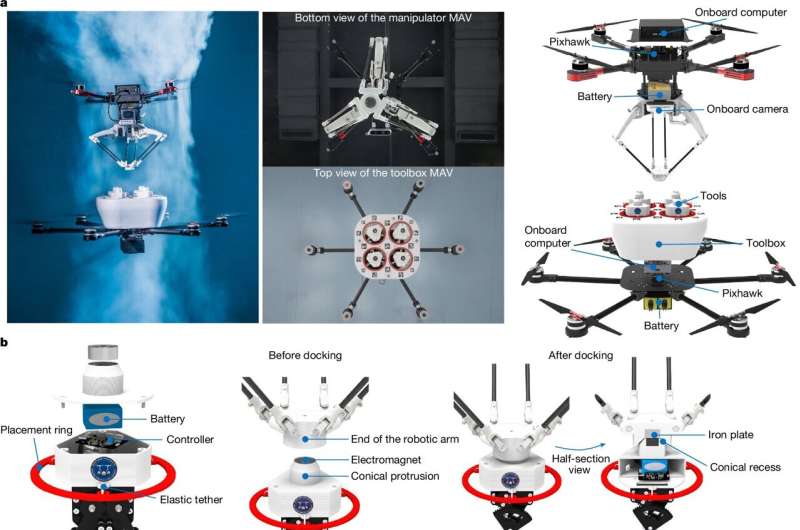
中国西湖大学FlyingToolbox深度解析:攻克下洗流难题,实现亚厘米级空中工具交换,赋能高危作业革新
西湖大学 FlyingToolbox 无人机系统登《Nature》,攻克下洗流干扰难题,空中工具交换达 0.80±0.33cm 亚厘米精度(超同类 6-8cm 水平),为工业维护等场景提供方案,待突破户外应用瓶颈。

SORA-DET轻量化框架深度解析:赋能无人机遥感目标检测,高精度与快速推理双重突破
大阪都市大学 SORA-DET 轻量化框架深度解析:专为无人机(UAV)遥感目标检测设计,通过部分重参数化卷积块(PRepConvBlock)实现 FLOPs 降低 32%、感受野提升 114%,浅层双向特征金字塔网络(SB-FPN)解决多尺度目标漏检,4 个检测头适配遥感幂律分布目标。性能实测:VisDrone201...

车载网络CAN(五):从使用和案例中学习CAN总线
本文将通过实例解释实际采用 CAN 时所需的知识和关键点,并提供 CAN 协议的总体概述,以及在实践中考虑 CAN 的设计、开发和采用的基本知识

车载网络CAN(四):CAN控制器的分类和工作原理
本文将主要侧重于硬件相关的主题,但如果您正确理解了这里的内容,那么在实际实施和测试 CAN 时肯定会有所帮助。

车载网络CAN(三):“帧”的结构、用法和错误处理方法
在本系列的第二篇“CAN通信的数据传输机制”中,我们介绍了“数据帧”和“远程帧”,作为CAN(控制器局域网)中数据传输方式的主题

车载网络CAN(二):CAN通信的数据传输机制
该专题连载共分为“五”篇,这是第二篇。本文的主题是CAN(控制器局域网)中的数据传输机制。让我们先来看看通信的基本单元——“帧”,这对于理解CAN通信至关重要。

车载网络CAN(一):CAN协议基础知识
我们将对车载网络中使用的标准“CAN(控制器局域网)”进行更详细的解释。






- 2025-06-19 牛喀直播间
- 2024-07-14 上海市静安区
- 2023-07-13 上海市徐汇区
- 2024-06-10 上海市闵行区
- 2024-12-28 牛喀直播间
- 2023-11-23 上海市静安区