汽车TBOX介绍
前言
车联网系统包含四部分,主机、汽车T-BOX、手机APP及后台系统。主机主要用于的影音娱乐,以及车辆信息显示;汽车T-BOX主要用于和后台系统/手机APP互联通信,实现后台系统/手机APP的车辆信息显示与控制。
一、TBOX是什么?
T-BOX,telematics box ,远程/车载通信模块,汽车T-BOX,存在多种叫法。

T-BOX是车联网系统中的一个重要组成部分,是一个集成车身网络和无线通讯功能的智能终端设备,通过连接车载CAN总线和外部云平台,实现车辆与车辆(V2V)、车辆与基础设施(V2I)、车辆与互联网(V2N)之间的通信和数据交换。T-BOX通常由一块处理器、一个GPS模块、一个无线模块(如3G、4G、5G等)、并支持多种接口(如CAN总线、USB、RS-232、蓝牙等)组成,如下图。
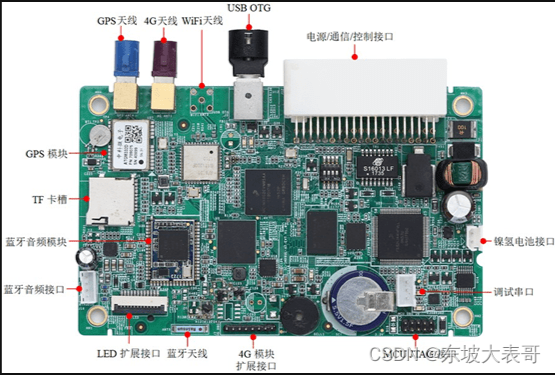
TBOX和域控制器分属两个不同的硬件,通过USB OTG线相连。
车辆上安装了T-BOX后,用户可以通过手机APP或PC客户端等方式实现对车辆的实时监控与控制,例如查询车辆状态、远程控制空调、锁门、开启发动机限制等。
作用
1.远程监控
2.远程控制
3.车辆定位
4.行车数据采集
5.故障诊断
6.远程升级服务,包括用户确认升级和静默升级
7.蓝牙钥匙服务,用于近程控车,共享车等业务拓展
8.智慧的电动车辆,增加电池的实时管理、监控和维护
二、TBOX 结构组成
内部硬件系统架构
以高通硬件平台,支持5G+V2X功能举例:
支持5G+V2X功能的通讯模组、SOC、MCU。
通讯模组主要完成无线数据、V2X数据收发,SOC为主要的AP单元,通常集成V2X、以太网协议栈,做业务的逻辑运算,MCU则主要负责网络管理、电源管理等与车端强相关的业务。
TBOX自身接口包括Call 按键信号输入、按键检测,音频输入输出,射频天线、无线通信天线、内置WIFI/BT天线等。
功能对手件包括EHU\BCM\VCU\ACU等,具备高精度定位功能的整车,如果不将高精度定位硬件集成在TBOX中,则TBOX会与专门负责高精度定位的PBOX有一路硬线连接,实现RTK云端差分感知数的数据传输,结合双频GNSS天线实现厘米级高精度定位。
四路内部数据流向
1.CAN
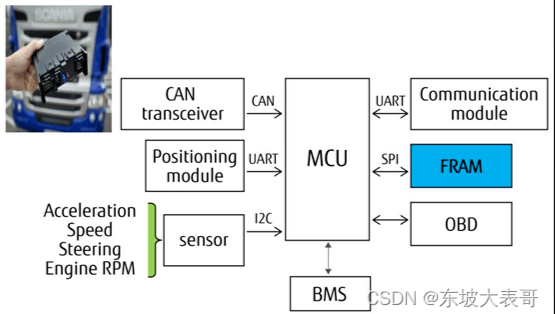
CAN总线的数据交互一般由MCU控制,控制着CAN报文的转发,也就是汽车状态的控制与上传、汽车故障检测、汽车仪表显示等等,下图可以表示为TBOX中MCU侧的功能结构,MCU控制着CAN报文。CAN报文数据经OBD、CAN收发器等外部数据源,经MCU接收后进行处理(此时MCU是CAN网关),再经串口把该转发的车辆信息转发到通信模组上,这个通信模组一般是4G/5G模块。
2.USB
TBOX为车机提供上网的功能,类似PC插一个USB网卡来上网。TBOX一般(不确定100%)会提供USB口供车机上网,一般我们在车机开热点的情况下,不做流量转发限制的情况下可以直接加入热点ping通TBOX。USB的数据流向和USB上网卡的模式相同。
3.蓝牙
和手机的蓝牙相似,但是TBOX大部分是集成了一个低功耗的蓝牙模块来实现手机和整车直接通信。
4.4G/5G
TBOX的4G/5G上网方案,一般由一个带有Linux基带的4G网卡承担.
5.GPS
GPS和蓝牙相同,自成一个模块。
三、TBOX主要技术
1.车联网通信技术:T-BOX作为一种车联网设备,其通信技术非常关键。它支持多种通信方式,如3G、4G、5G等移动通信网络、WLAN、蓝牙等短距离通信技术,以及车辆CAN总线等。
2.定位技术:T-BOX内置了GPS模块,可以通过GPS技术获取车辆的定位信息,并将这些信息上传到云端。同时,T-BOX还支持北斗、GLONASS等不同卫星系统的定位。
3.数据采集与处理:T-BOX可以采集车辆的行车数据,如车速、油耗、里程、车门状态等,并对这些数据进行处理和分析,为用户提供更加丰富的车辆数据信息。
4.远程控制技术:T-BOX可以实现远程控制车辆的各种功能,例如远程启动、远程解锁、远程开启空调等。
5.安全性技术:在车联网应用中,安全性问题尤为关键。T-BOX具备一系列安全性技术,如数据传输加密、身份验证、防篡改等。
6.OTA升级技术:T-BOX支持OTA(Over The Air)升级技术,即通过云端对其进行固件升级,使其具备更多的功能和性能。
四、车联网技术三种方案
讲技术方案之前先聊下TBOX里面核心的CAN总线通信。
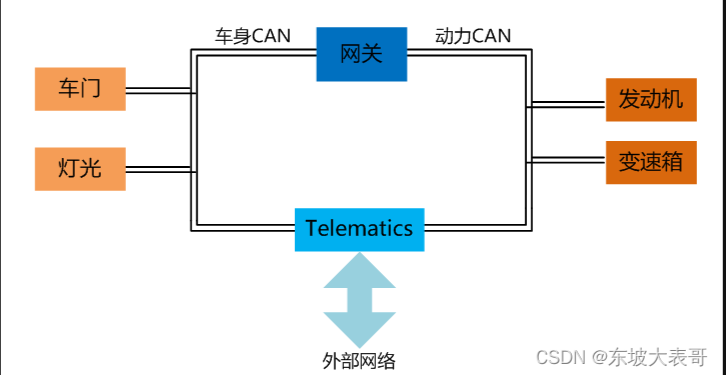
下图是目前汽车内的主流总线架构形式(图中每一个框代表一个ECU)
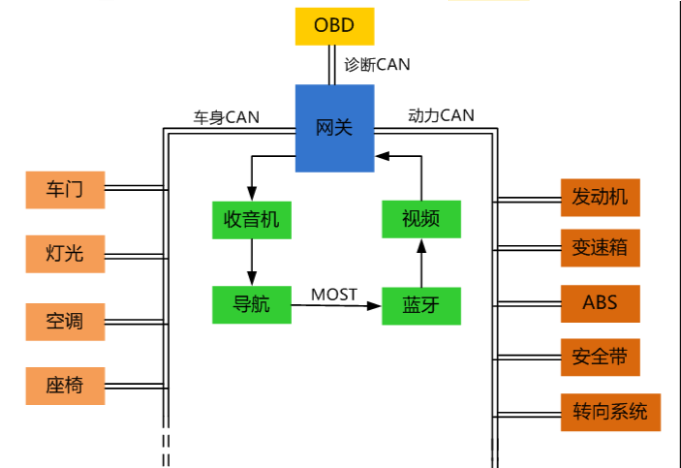
CAN总线为了便于管理和控制,一般按功能需求进行划分,主要分类三类,车身CAN,动力CAN和诊断CAN。车身总线采用低速,动力采用高速,诊断CAN专门与车内的OBD接口相连。
CAN总线传输速率不高,由于车内导航、影音传输要求高,一般采用速率可达22.5MB/s的MOST总线或类似的高速总线。不同总线网络之间的通信,全部依靠网关转发报文。各厂商架构会有不同,但总体是这种模式。
如果要实现车联网,即车与网联动。在CAN总线为主导的今天,势必要将具有联网功能的模块加入到车内CAN总线架构中。在已经实现第一阶段技术的车联网产品中,大概又有三种技术方案。
1.OBD盒子联网
将可联网的设备(OBD盒子)插入车辆的OBD诊断接口,通过诊断CAN读取车辆的相关行驶信息。这种方案被很多互联网企业采用,汽车厂商只有极少数采用。
优点:无需改动车内的总线架构,无需汽车厂商的配合,即插即用。因为OBD口是汽车强制必须留出来的,主要用作车辆检测和后期的程序升级维护。
缺点:一般只能读取车内数据,无法实现远程控制,功能有限。而且,只要车厂封掉汽车行驶时的诊断CAN通信,这种方式就没用了。
2.Telematics(无线通信车载系统)直连CAN总线
直接将具有远程通信功能的模块接入CAN总线,通过telematics模块读取各ECU的信息,并发送相应的控制信息,实现部分远程操控功能。
优点:报文不需网关转发,信息传递直接有效,实现较为方便。
缺点:安全性不足,一旦telematics被攻击,整车的CAN总线几乎就暴露在黑客手中。
3.Telematics连在CAN外网络

如图的例子,将telematics模块加入MOST总线,直接与娱乐系统连接,并通过MOST网关转发相应的车辆信息和控制信息。
优点:外部网络与娱乐系统高度融合,便于实现车联网娱乐和社交属性;信息需要通过MOST网关转发,安全性较高。
缺点:MOST总线成本高,MOST网关开发难度大。
总结
这三种技术方案虽然各有优劣,但只要连入了CAN总线,在网关允许的情况下基本都能实现对车内各ECU的访问和控制,不论是车身部分还是动力部分。那为何我要将控制车身和控制动力放在两个不同的阶段呢?这一点主要是考虑到安全性问题,从技术角度看通过远程启动发动机、控制转向基本都没有障碍,但现今众多厂商极少有这么做的,大家忌惮的都是这安全性。
相关名词
OBD: On-Board Diagnostic 车载诊断系统
MOST: Media Oriented System Transport 面向媒体的系统传输总线
CAN: CAN总线协议,控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线
转载自CSDN-东坡大表哥
相关文章