自动驾驶车如何避免交通伤亡意外?传感器融合技术给你答案!
内容提要:传感器融合算法将消除人为错误,从而增加安全性并防止道路交通伤亡事故的发生。
人们对自动驾驶汽车的信心已经有所动摇...3月18日晚上10点多,一辆Uber自动驾驶车辆在亚利桑那州与一名行人相撞,并致其死亡。3月25日,一辆处于半自动驾驶模式的特斯拉Model X撞上美国加州山景城101高速公路中间的混凝土隔离带上,随后电池起火,车主身亡。
人们总是对未知的事物充满恐惧。根据调研机构AAA(American Automation Association,美国汽车协会)最近的一份调查,78%的美国消费者表示他们害怕乘坐一辆完全自动驾驶的汽车上,还有54%的美国人甚至不愿意与自动驾驶汽车共享道路,他们说那样没有安全感。
近年来,多起备受瞩目的道路交通伤亡事故发生根据数据统计表明,完全自动驾驶汽车的技术还远不成熟。加上“对新事物的恐惧”,种种负面新闻的影响,以及对自动驾驶汽车缺乏理解,人们确实仍较难拥抱全自动驾驶。
传感器融合算法的出现,使自动驾驶更加可靠和安全,这将有助于民众克服对全自动驾驶的恐惧。本文将为大家介绍五种传感器的相互融合,以及传感器与道路基础设施的融合。在11月9日的智能驾驶的传感器融合技术培训中,来自北美通用汽车的专家也会深度讲解各种传感器融合的算法和应用案例。传感器融合算法将消除人为错误,从而增加安全性并防止道路交通伤亡事故的发生。
“五”大于“一”
/传感器融合是将来自多个传感器的数据合并,其数据合并计算出的结果将优于单个传感器的数据结果。/
为了确保安全的驾驶体验,全自动驾驶汽车需要以高精度和高准度来感知周围环境。将数个传感器组合在一起,并以每秒1兆字节的速度将来自传感器的数据融合在一起,让驾驶员知道,车辆已经为所有可预想的道路场景做了充分的准备。
传感器融合具有数量的优势
所有技术都是一把利弊并存的双刃剑。在全自动驾驶汽车中,单个传感器很难作为一个独立的系统运作。将每个传感的优势融合,创建高质量的重叠数据模式,就可以使处理的数据尽可能准确。
/传感器融合系统结合了单个传感器的优点,构建了关于汽车所处的假设环境状态。/
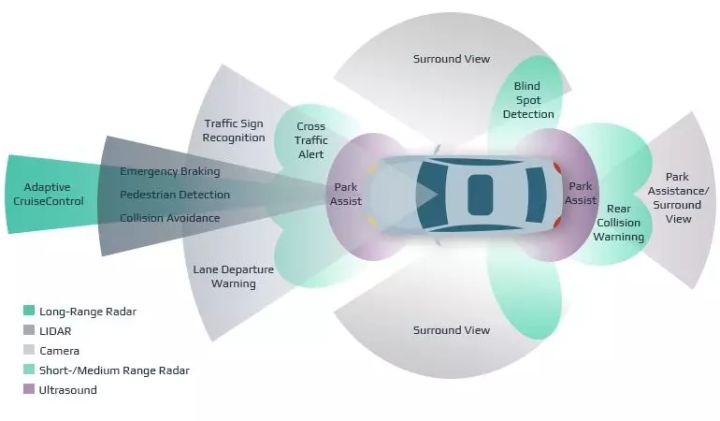
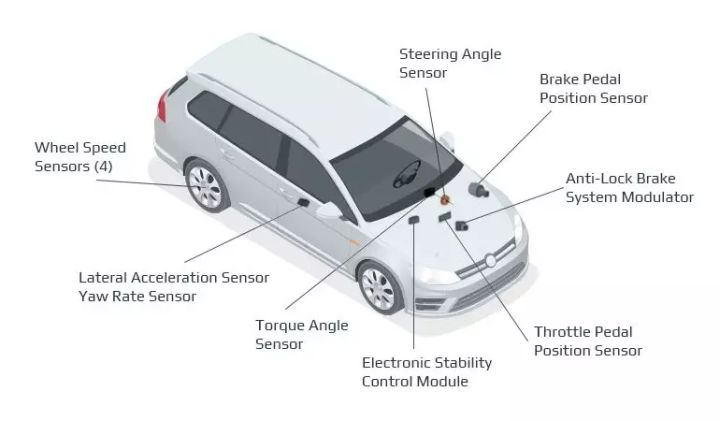
自动驾驶汽车的五个主要传感器类型
用于自动驾驶安全性能的最佳传感器组合:
·超声波传感器 - 检测车辆附近的障碍物
·GPS - 计算经度、纬度、速度和航线
·角速度传感器 - 测量速度和车轮转速
·激光雷达 - 正确识别物体
·相机 - 检测、分类和确定与物体的间距
1)超声波传感器
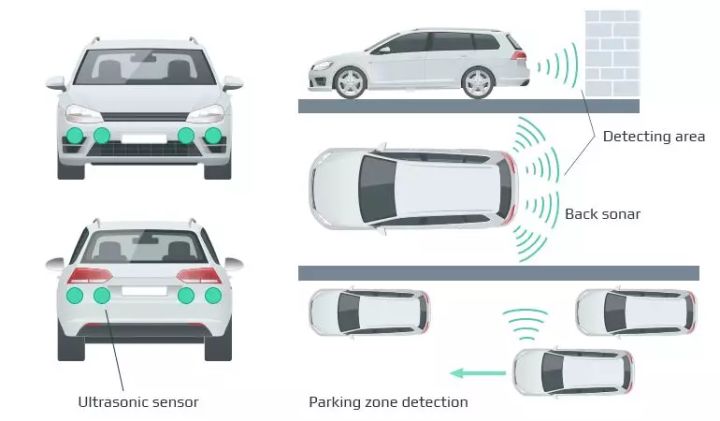
超声波传感器对全自动驾驶车辆的安全性起到了不可或缺的作用。传感器发出声波,从附近物体反弹回来。利用回弹过程的时间等信息,传感器可以识别与物体的间距,靠近物体时,车辆便会发出提醒。
该技术适用于低速和中短距离的实际应用,例如制动辅助系统、自动泊车系统和限速识别系统等等。
2)GPS传感器

GPS是全球定位系统(GlobalPosition System)的简称。GPS在复杂的动态环境中,尤其在大城市,其多路径反射的问题很显著,导致获得的GPS定位信息很容易产生几米的误差。另外,由于GPS的更新频率低(10Hz),在车辆快速行驶时很难给出精准的实时定位。单纯依赖GPS的导航很有可能导致交通事故。将GPS所获得的数据与其他传感器信息相结合,使其成为多个传感器协同工作的重要组成部分,可以使GPS发挥其最大优势,这也体现了传感器融合技术的重要性。
3)角速度传感器
速度传感器是通过测量纵向和垂直轴上的加速度,记录车轮的转速,并将这些数据传输到自动驾驶安全系统。
角度传感器是用于确定前轮的位置。当该数据与其他数据结合,就可以计算出自动驾驶车辆的动态。
当无法准确进行地理定位时(例如在穿过隧道时),速度和角度的数据组合将被组合计算来进行航位推算(Dead Reckoning)
/航位推算系统(Dead Reckoning System,DRS)是较常用的自主式车辆定位技术,利用距离传感器和方位传感器测量出车辆的行驶距离、速度和方位。在知道当前时刻位置的条件下,通过测量移动的距离和方位,推算下一时刻位置的方法。/
4)LIDAR传感器
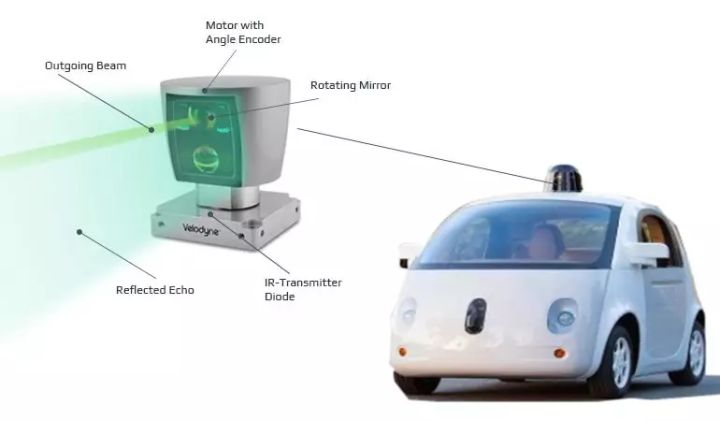
为了解决测距的问题,引入了激光雷达这种传感器。常常应用在Level 3级别以上的无人车。激光雷达的工作原理是利用可见和近红外光波(多为950nm波段附近的红外光)发射、反射和接收来探测物体。
利用激光返回的时间和波长的差异,一是可以用于3D建模进行环境感知,二是可以同步建图,实现导航和加强车辆的定位精度。
5)车载摄像头

安全自动驾驶的关键是能够准确的感知和区分移动环境中的障碍物。
最经济有效的解决方案是使用车载摄像头。常用的是后视镜和360度相机,它们将提供来自汽车外部的环境图像。
车载摄像机的大致原理是:首先,采集图像进行处理,将图片转换为二维数据;然后,进行模式识别,通过图像匹配进行识别,如识别车辆行驶环境中的车辆、行人、车道线、交通标志等;接下来,依据物体的运动模式或使用双目定位,以估算目标物体与本车的相对距离和相对速度。
数据采集和传感器融合的重要性
传感器融合的数据对于全自动驾驶的安全性来说至关重要。
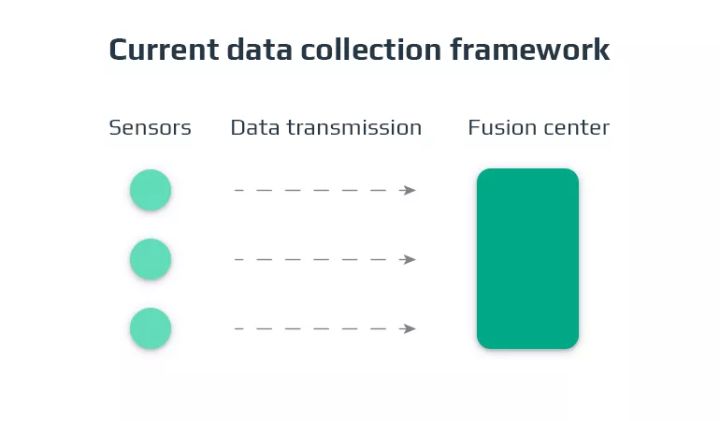
来自传感器的信息进入遥测过程,并被传送到接收设备,如机载系统或用于监视的通信中心。这种数据的交换可以在自动驾驶系统中自行进行配置,以预测和适应车辆的状态,完全不需要人工干预。
这对于汽车厂商来说就是一座“金矿”。所以各大厂商都在致力于打造卓越的自动驾驶汽车,并训练新一代的机器学习算法。
为了拥有一个完全自动化的系统,以确保乘客和道路上其他人的安全,使用多传感器数据融合将使自动驾驶汽车更安全、更快速、更高效。
要将来自多个传感器的数据完美“合并”在一起,以产生更可靠更准确的信息,这需要使用传感器融合算法来计算。
其中一个算法被称为卡尔曼滤波器。
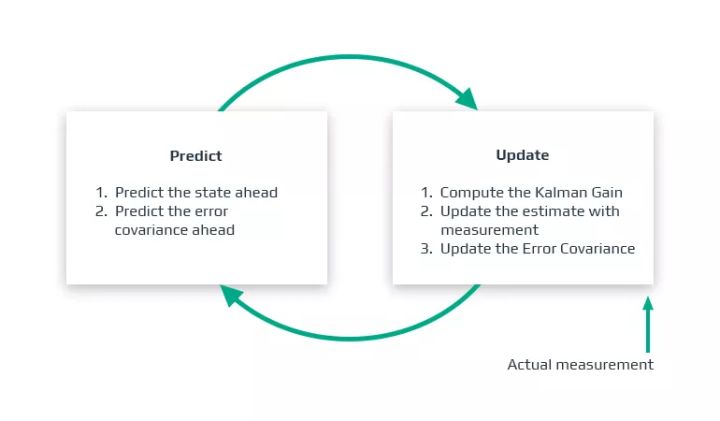
卡尔曼滤波(Kalman filtering)一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。简单来说,卡尔曼滤波器是一个“optimal recursive data processing algorithm(最优化自回归数据处理算法)”。对于解决很大部分的问题,它是最优且效率最高甚至是最有用的。Kalman滤波在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态。由于卡尔曼滤波器容易在计算机中实现计算,并能够对现场采集的数据进行实时的更新和处理, Kalman滤波是目前应用最为广泛的滤波方法。
交通意外逐渐减少
今天,声波、光波、地理定位、视觉和速度的传感器的数据融合在了一起,大大降低了人为驾驶车辆中意外死亡的风险。先进的传感器融合技术专为无人驾驶汽车的全自动化而开发,现在已经逐步被各大汽车厂商所应用,即将走进您的生活中。
实时数据更新,瞬间做出安全决策的能力,拥有比你的大脑更全面的感知能力,这就是最先进的传感器融合技术带给你的全自动安全驾驶体验。你可以放下你的恐惧,拥抱新兴的交通未来。
一个更安全,更快的无人驾驶世界即将到来。你,准备好了吗?
作者:牛小喀
牛喀网文章,未经授权不得转载!
相关文章